
страница - 103
кулярен границе, амплитуда уменьшается с глубиной.
При нормальном падении волны на границу трансформация отсутствует, и формулы для коэффициентов имеют вид:
Rn = ; Ru = Rl; z+z
2z ~ 4zz z +z\z+z)
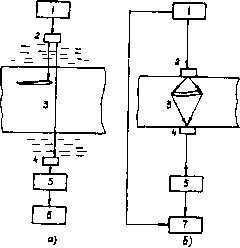
Прямые совмещенные преобразователи (рис. 3.5.8, а) служат для излучения и приема продольных упругих волн. Обе эти функции выполняет один пьезоэлемент.
В раздельно-совмещенных преобразователях (рис. 3.5.8, в) для излучения и приема продольных волн используют разные пьезоэ-лементы, смонтированные в общем корпусе. Применяют также раздельные преобразователи, один из которых только излучает, другой только принимает упругие волны.
Для работы поперечными, поверхностными и волнами Лэмба служат наклонные преобразователи (рис. 3.5.8, б). Все эти волны возбуждаются в контролируемом изделии путем трансформации продольных волн, падающих на границу раздела "преобразователь -изделие" под различными углами. При приеме происходит обратная трансформация.
Применяют также другие пьезопреобра-зователи - широкополосные, с регулируемыми углами наклона, фокусирующие, многоэлементные (матричные) и т.п. Для передачи упругих волн между этими преобразователями и контролируемыми объектами необходимо наличие материальной среды, создающей акустический контакт. Этот контакт реализуется через:
тонкий слой жидкости (контактный способ);
где Z и z% - характеристические сопротивления верхней и нижней сред для продольных волн.
Для возбуждения и приема упругих колебаний используют электроакустические преобразователи. Наиболее распространены пьезоэлектрические преобразователи. Они очень разнообразны и отличаются назначением, исполнением, рабочими частотами и другими параметрами.
2 1 3 8
J
S
слой жидкости толщиной h порядка длины волны X в ней (щелевой способ);
толстый слой жидкости Н»Х (иммерсионный способ);
слой эластичного пластика (сухой способ).
На низких частотах (до 60 - 100 кГц) применяют сухой точечный контакт через выпуклую поверхность наконечника преобразователя.
При решении специальных задач для излучения и приема упругих колебаний применяют бесконтактные преобразователи, в том числе:
электромагнитно-акустические • (ЭМА), основанные на эффектах электромагнитного поля;
оптические, использующие лазерное возбуждение и интерференционный прием упругих колебаний;
пьезоэлектрические, излучающие и принимающие упругие волны через толстый (А>>Х) слой воздуха.
Однако по чувствительности бесконтактные преобразователи уступают пьезоэлектрическим с жидкостной связью с контролируемым объектом.

Рве. 3.5.8. Конструкция пьезопреобразователей:
а - прямого совмещенного; б - наклонного; в - раздельно-совмещенного; 1 - пьезоэлемент; 2 - демпфер; 3 - протектор; 4 - слой контактной жидкости; 5 - контролируемый объект; 6 - корпус; 7- вывод; 8 - призма: 9 - акустический экран
3.5.2. КЛАССИФИКАЦИЯ АКУСТИЧЕСКИХ МЕТОДОВ
Акустические методы неразрушающего контроля делят на две большие группы - активные и пассивные методы (рис. 3.5.9).
Активные методы основаны на излучении и приеме упругих волн, пассивные -только на приеме волн, источником которых служит сам контролируемый объект.
Активные методы делят на методы прохождения, отражения, комбинированные (использующие как прохождение, так и отражение), импедансные и методы собственных частот.
Методы прохождения используют излучающие и приемные преобразователи, расположенные по разные или по одну сторону контролируемого изделия. Применяют импульсное или (реже) непрерывное излучение и анализируют сигнал, прошедший через контролируемый объект.
К методам прохождения относят:
амплитудный теневой метод, основанный на регистрации уменьшения амплитуды волны, прошедшей через контролируемый объект, вследствие наличия в нем дефекта (рис. 3.5.10, а)\
временной теневой метод, базирующийся на регистрации запаздывания импульса, вызванного увеличением его пути в изделии при огибании дефекта (рис. 3.5.10, б); тип волны при этом не меняется;
велосимметрический метод, основанный на регистрации изменения скорости распространения дисперсионных мод упругих волн в зоне дефекта и применяемый при одностороннем и двустороннем доступе к контролируемому объекту (рис. 3.5.10, в). В этом методе обычно используются преобразователи с сухим точечным контактом. В варианте с односторонним доступом (рис. 3.5.10, в, верх) скорость возбуждаемой излучателем антисимметричной волны нулевого порядка (#о) в отдельном дефектном слое меньше, чем в бездефектной зоне. При двустороннем доступе (рис. 3.5.10, в, внизу) в бездефектной зоне энергия передается продольной волной L, в зоне дефекта - волнами #о> которые проходят больший путь и распространяются с меньшими скоростями, чем продольная волна. Дефекты отмечаются по изменению фазы или увеличению времени прохождения (только в импульсном варианте) по контролируемому изделию.
В методах отражения используют как один, так и два преобразователя; применяют импульсное излучение. К этой подгруппе относят следующие методы дефектоскопии.
Эхо-метод (рис. 3.5.11, а) основан на регистрации эхо-сигналов от дефекта. На экране индикатора обычно наблюдают посланный (зондирующий) импульс 7, импульс III, отраженный от противоположной поверхности
(дна) изделия (донный сигнал), и эхо-сигнал от дефекта II Время прихода импульсов II и III пропорционально глубине залегания дефекта и толщине изделия. При совмещенной схеме контроля (рис. 3.5.11, а) один и тот же преобразователь выполняет функции излучателя и приемника. Если эти функции выполняют разные преобразователи, то схему называют раздельной.
Эхо-зеркальный метод основан на анализе сигналов, испытавших зеркальное отражение от донной поверхности изделия и дефекта, т.е. прошедших путь А&СД (рис. 3.5.11, б). Вариант этого метода, рассчитанный на выявление вертикальных дефектов в плоскости EF, называют методом тандем. Для его реализации при перемещении преобразователей А и D поддерживают постоянным значение 1А л-ljy = 2/f tga; для получения зеркального отражения от невертикальных дефектов значение 1А + lj) варьируют. Один из вариантов метода, называемый икосой тандем", предусматривает расположение излучателя и приемника не в одной плоскости (рис. 3.5.11, б, вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от дефекта. Еще один вариант, называемый К-метод, предусматривает расположение преобразователей по разные стороны изделия, например располагают приемник в точке С.
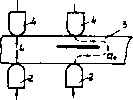
Дельта-метод (рис. 3.5.11, в) основан на приеме преобразователем для продольных волн 4, расположенным над дефектом, рассеянных на дефекте волн, излученных преобразователем для поперечных волн 2.
Дифракционно-временной метод (рис. 3.5.11, г), в котором излучатели 2 и 2\ приемники 4 и 4х излучают и принимают либо продольные, либо поперечные волны, причем могут излучать и принимать разные типы волн. Преобразователи располагают так, чтобы получать максимумы эхо-сигналов волн, дифрагированных на концах дефекта. Измеряют амплитуды и время прихода сигналов от верхнего и нижнего концов дефекта.
Реверберационный метод (рис. 3.5.1г, д) Использует влияние дефекта на время затухания многократно отраженных ультразвуковых импульсов в контролируемом объекте. Например, при контроле клееной конструкции с наружным металлическим слоем и внутренним полимерным слоем дефект соединения препятствует передаче энергии во внутренний слой, что увеличивает время затухания многократных эхо-сигналов во внешнем слое. Отражения импульсов в полимерном слое обычно отсутствует вследствие большого затухания ультразвука в полимере.
В комбинированных методах используют принципы как прохождения, так и отражения акустических волн.
Акустические. методы н&разрушонэсцл е.о контроля
\про*отЭ*-\
г*-» г*- г*1
Я к. та оные методы
. JUHU-
r*-i r*-i гц
отратемия
ТЛИ
r*i r*H f*-i rS rS
i
I
собственны* ч9*тоа
колебаний
гтт
\c6oSodn колебаний
I
г
Ш
Лоссо6*$*\ метоЭы
Рис. 3.5.9. Классификация акустических методов контроля
в)
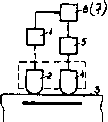
Рис. 3.5.10. Методы прохождения
с - теневой; 6" - временной теневой; в -------1 - генератор; 2 - излучатель; 3 - объект контроля; 4 - прием 7 - измеоител
геневой; б - временной теневой; в - велосимметрический;
п>; 3 - объект контроля; 4 - приемник; 5 - усилитель; 6 - измеритель амплитуды; 7 - измеритель времени пробега; 8 - измеритель фазы
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15] [стр.16] [стр.17] [стр.18] [стр.19] [стр.20] [стр.21] [стр.22] [стр.23] [стр.24] [стр.25] [стр.26] [стр.27] [стр.28] [стр.29] [стр.30] [стр.31] [стр.32] [стр.33] [стр.34] [стр.35] [стр.36] [стр.37] [стр.38] [стр.39] [стр.40] [стр.41] [стр.42] [стр.43] [стр.44] [стр.45] [стр.46] [стр.47] [стр.48] [стр.49] [стр.50] [стр.51] [стр.52] [стр.53] [стр.54] [стр.55] [стр.56] [стр.57] [стр.58] [стр.59] [стр.60] [стр.61] [стр.62] [стр.63] [стр.64] [стр.65] [стр.66] [стр.67] [стр.68] [стр.69] [стр.70] [стр.71] [стр.72] [стр.73] [стр.74] [стр.75] [стр.76] [стр.77] [стр.78] [стр.79] [стр.80] [стр.81] [стр.82] [стр.83] [стр.84] [стр.85] [стр.86] [стр.87] [стр.88] [стр.89] [стр.90] [стр.91] [стр.92] [стр.93] [стр.94] [стр.95] [стр.96] [стр.97] [стр.98] [стр.99] [стр.100] [стр.101] [стр.102] [стр.103] [стр.104] [стр.105] [стр.106] [стр.107] [стр.108] [стр.109] [стр.110] [стр.111] [стр.112] [стр.113] [стр.114] [стр.115] [стр.116] [стр.117] [стр.118] [стр.119] [стр.120] [стр.121] [стр.122] [стр.123] [стр.124] [стр.125] [стр.126] [стр.127] [стр.128] [стр.129] [стр.130] [стр.131] [стр.132] [стр.133] [стр.134] [стр.135] [стр.136] [стр.137] [стр.138] [стр.139] [стр.140] [стр.141] [стр.142] [стр.143] [стр.144] [стр.145] [стр.146] [стр.147] [стр.148] [стр.149] [стр.150] [стр.151]