
страница - 118
ритмы. Это достижимый уровень точности или качества реконструкции и мера сложности вычислений, позволяющая оценить временные затраты, связанные с получением искомой оценки.
Для сравнения сложности вычислительных процессов вводится понятие меры сложности вычислений /(л1/)> где /- число, характеризующее сложность работы алгоритма Ai применительно к исходным данным. Во многих случаях / характеризуется или числом элементарных шагов (например, числом арифметических операций, характеризующих длительность вычислительного процесса), или объемом памяти, который может понадобиться для реализации всех выкладок по ходу решения.
Менее строгой оценкой точности воспроизведения изображений является субъективная экспертиза, заключающаяся в сравнении реконструированного данным алгоритмом изображения \х(х,у с исходным цэ(х,}>),
которое является или математической моделью объекта, дискретная версия которой хранится в памяти ЭВМ, или реальной физической моделью с заранее известными структурными свойствами. Однако визуальная оценка базируется на психофизических свойствах зрительной системы человека и поэтому не является надежной. Специалисты довольно часто расходятся в том, какое из двух изображений точнее воспроизводит третье.
Строгим подходом к качественной оценке верности воспроизведения изображения является мера, которая выражается числовым результатом взаимного сравнения двух изображений.
Из сравнения мер различия можно видеть, что качество реконструкции изображения алгоритмами обратного проецирования с фильтрацией сверткой по массиву достаточно точных исходных данных практически выше, чем у других алгоритмов, однако это не означает, что не существует случаев, когда изображения более высокого качества не могут быть получены другими методами. Так, при высоком уровне шумов в исходных данных, например алгебраические алгоритмы реконструкции, являющиеся в отличие от детерминированных методов реконструкции с преобразователем в большинстве случаев вероятностными и обладающие в силу этого большей устойчивостью к погрешностям, позволяют восстанавливать в присутствии шумов изображения более высокого качества, чем АОПФС.
С достаточной степенью точности процесс реконструкции изображения \х (х,у)
можно считать линейным и инвариантным относительно пространственного сдвига. Сис-
тему вычислительной томографии можно рассматривать поэтому как многомерный линейный пространственный фильтр, а исходное распределение ц(х,.у) как входной сигнал.
Следовательно, точность воспроизведения будет зависеть как от передаточной функции системы ЩКХ, Ку)у так и от спектрального
состава исходного распределения МКх,Ку.
Поэтому в ряде работ предлагается по реконструкции точечного объекта, помещенного в начало координат, оценивать качество реконструкции изображения. Получившееся после реконструкции изображение называют функцией импульсного отклика или функцией рассеяния тонки.
Критериями точности воспроизведения изображения по передаточной функции, описывающей процедуру реконструкции изображения, являются полуширина функции рассеяния точки на полувысоте, интенсивность первого бокового лепестка и интенсивность фона на большом расстоянии от максимума вдоль соответствующего направления.
Например, с использованием критерия качества по функции рассеяния точки были проведены исследования влияния различных функций ядра дискретной свертки и интерполирующей функции на точность воспроизведения изображения и определены их оптимальные сочетания при реконструкции по методам АОПФС и АФОП. Рекомендации сводятся в основном к реализации сильной низкочастотной фильтрации изображений и проекций, следствием чего является вывод о безусловной оптимальности линейной интерполяции и низкочастотности ядер свертки.
Кроме погрешностей, обусловленных особенностями алгоритмов реконструкции, существует и большая группа погрешностей, связанная с организацией сбора данных. Они являются неотъемлемыми спутниками измерительной аппаратуры вычислительной томографии и существенно влияют на точность воспроизведения пространственной структуры контролируемых объектов. К ним относятся:
-квантовая природа используемого рентгеновского излучения;
-нестабильности свойств излучателя;
-нестабильность детекторов;
-погрешности измерительной электроники, сканирующей системы и др.
Несмотря на такое многообразие источников ошибок, практически во всех коммерческих системах промышленной вычислительной томографии точность воспроизведения томограмм доведена до уровня методических ограничений за счет оптимизации конструкции, тщательного изучения систематических составляющих погрешностей измерения и их коррекции как на аппаратном, так и программном уровнях.
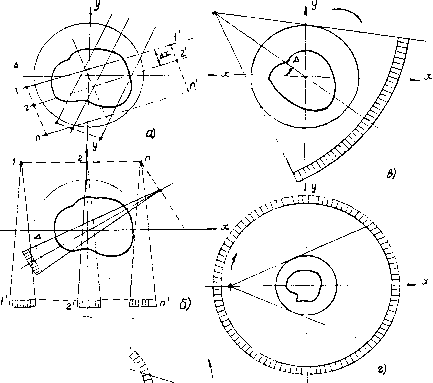
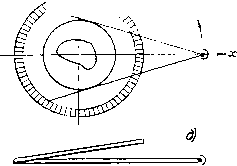
Рис. 3.8.4. Схемы сканирования поколений:
а - первого; б - второго; в - третьего; г - четвертого; д - пятого
В реальных томографических системах по ряду причин находит почти исключительное применение алгоритм обратного проецирования с фильтрацией сверткой. Известны отдельные случаи применения Фурье-алгоритма; для изделий определенной конфигурации при ограниченном числе проекций целесообразно применение итерационного метода. В то же время алгоритму обратного проецирования с фильтрацией сверткой свойственно высокое быстродействие при приемлемой точности, поскольку для его реализации требуется относительно малое число операций. Кроме того, он позволяет осуществлять обратное проецирование отдельной обработанной проекции
независимо от совокупности остальных, так что полное изображение может быть получено непосредственно после обработки отдельной проекции. Такая реконструкция близка к реконструкции в реальном времени.
3.8.2.2. ОСНОВНЫЕ СИСТЕМЫ РАДИАЦИОННЫХ ТОМОГРАФОВ
Сканеры
Трехмерная структура объекта реально реконструируется последовательно, слой за слоем. В этом случае для реконструкции необходимо иметь данные ослабления излучения по траекториям, лежащим в плоскости слоя.
Для эффективной реконструкции этот набор должен быть полным. Понятие полноты проекционных данных базируется на следующем:
-проекционные данные получены по направлениям с равным угловым интервалом в пределах 180° или 360°;
-по всем дискретным направлениям получены равноотстоящие проекционные данные;
-каждая точка в поперечном сечении объекта контроля дает вклад в проекционные данные по всем дискретным угловым направлениям.
От числа и точности проекционных данных зависит погрешность реконструкции. Используют схемы сканирования, которые можно разбить на несколько классов, традиционно именуемых поколениями. Поколения различаются видом относительного движения источника излучения и детектирующей системы, числом детекторов, временем сбора проекционных данных.
Наиболее простой является схема 1-го поколения, включающая источник и детектор (рис. 3.8.4, а). Система источник (1 ... п) -детектор (/ ... п) перемещается параллельно самой себе с шагом Ах После сканирования всей области реконструкции при положении параллельных прямых под углом А к оси х система источник-детектор поворачивается на малый дискретный угол и аналогично происходит получение новой дискретной проекции. Процесс сбора заканчивается, когда полный угол поворота составит 180° или 360°. При использовании этой схемы за счет возможности сильного коллимирования пучка мало влияние рассеянного излучения. Требования к детектору не являются жесткими. Возможна калибровка детектора в ходе контроля. Легко меняется шаг сканирования и угол поворота системы. Основной недостаток - большое время сканирования.
В схеме 2-го поколения (рис. 3.8.4, 6) источник излучения формирует плоский веерный пучок с углом раскрытия" в несколько градусов. В качестве приемника используется линейка с несколькими коллиминированными детекторами. В результате линейного перемещения производится измерение данных одновременно для стольких наборов параллельных проекций, сколько детекторов в матрице. Каждый набор соответствует проекциям 1-го поколения, повернутым на единичный угол, образуемый направлениями от фокуса источника излучения да центры соседних детекторов. Поскольку за один цикл линейного перемещения формируется столько параллельных проекций, сколько детекторов в матрице, время сбора проекций сокращается во столько же раз по сравнению с 1-м поколением.
В схемах 1-го и 2-го поколений должны формироваться проекции, содержащие информацию в виде отсчетов, разделенных равными интервалами, привязанными к координатам объекта контроля. Это предъявляет определенные достаточно высокие требования к точности линейного перемещения и отсчета координат в процессе перемещения. Исключение линейного перемещения осуществляется в схеме сканирования 3-го поколения (рис. 3.8.4, в). В этой схеме система источник-матрица детекторов совершает только вращательное движение вокруг исследуемого объекта, или соответственно объект вращается внутри неподвижной системы.
Веерный пучок излучения, формируемый коллиматором, имеет угол раскрытия, охватывающий максимальный поперечный размер контролируемого объекта. Прошедшее объект излучение регистрируется большим числом детекторов. Отличие 3-го поколения от 1-го и 2-го заключается в том, что проекция формируется одномоментно по данным всех детекторов. Таким образом, формирование параллельных проекций в этой схеме в принципе невозможно, формируются так называемые веерные проекции.
Детекторы в этой схеме должны обладать высокой идентичностью параметров и стабильностью, поскольку прямые источник-детекторы всегда проходят через объект при любом возможном положении системы и поэтому калибровка детекторов в ходе измерений не осуществима. Для обеспечения идентичности каналов регистрации используют однородные детекторы.
Преимущество схемы 3-го поколения -одномоментное получение всей проекции. Поэтому полный набор проекций в угле 360° получается очень быстро, при непрерывном относительном вращении объекта и системы излучатель-приемники. Здесь скорость враще-. ния обусловлена временем накопления квантов излучения для получения отсчета проекции. Эта схема сканирования наиболее широко используется в медицинской томографии, так как время сбора всех проекций составляет несколько секунд.
Еще более быстродействующей за счет движения детекторов является схема сканирования 4-го поколения (рис. 3.8.4, г). В схеме детекторы размещены неподвижно по окружности, внутри которой источник излучения перемещается по окружности меньшего радиуса, а в центре находится объект исследований. Кроме ускорения процесса сканирования преимуществом является возможность калибровки детекторов в моменты, когда прямая от источника к детектору не пересекает объект. Наиболее серьезный недостаток - влияние рассеянного излучения на качество реконструкции.
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15] [стр.16] [стр.17] [стр.18] [стр.19] [стр.20] [стр.21] [стр.22] [стр.23] [стр.24] [стр.25] [стр.26] [стр.27] [стр.28] [стр.29] [стр.30] [стр.31] [стр.32] [стр.33] [стр.34] [стр.35] [стр.36] [стр.37] [стр.38] [стр.39] [стр.40] [стр.41] [стр.42] [стр.43] [стр.44] [стр.45] [стр.46] [стр.47] [стр.48] [стр.49] [стр.50] [стр.51] [стр.52] [стр.53] [стр.54] [стр.55] [стр.56] [стр.57] [стр.58] [стр.59] [стр.60] [стр.61] [стр.62] [стр.63] [стр.64] [стр.65] [стр.66] [стр.67] [стр.68] [стр.69] [стр.70] [стр.71] [стр.72] [стр.73] [стр.74] [стр.75] [стр.76] [стр.77] [стр.78] [стр.79] [стр.80] [стр.81] [стр.82] [стр.83] [стр.84] [стр.85] [стр.86] [стр.87] [стр.88] [стр.89] [стр.90] [стр.91] [стр.92] [стр.93] [стр.94] [стр.95] [стр.96] [стр.97] [стр.98] [стр.99] [стр.100] [стр.101] [стр.102] [стр.103] [стр.104] [стр.105] [стр.106] [стр.107] [стр.108] [стр.109] [стр.110] [стр.111] [стр.112] [стр.113] [стр.114] [стр.115] [стр.116] [стр.117] [стр.118] [стр.119] [стр.120] [стр.121] [стр.122] [стр.123] [стр.124] [стр.125] [стр.126] [стр.127] [стр.128] [стр.129] [стр.130] [стр.131] [стр.132] [стр.133] [стр.134] [стр.135] [стр.136] [стр.137] [стр.138] [стр.139] [стр.140] [стр.141] [стр.142] [стр.143] [стр.144] [стр.145] [стр.146] [стр.147] [стр.148] [стр.149] [стр.150] [стр.151]